Chi-Yao (Trey) Huang
Hello and welcome to my place. I'm Chi-Yao (Trey) Huang (黃祺堯).
I am currently pursuing my Ph.D. under the guidance of Professor Yezhou Yang at the School of Computing and Augmented Intelligence, Arizona State University. Prior to joining ASU, I served as a pioneering VR/AR engineer at VIVE (now part of Google), where I developed innovative VO/SLAM technologies that power nearly all VIVE products. I also hold a master's degree in Mechanical Engineering from National Taiwan University.
My research focuses on interpretable and controllable latent-space learning for embodied AI and world models.

Publications
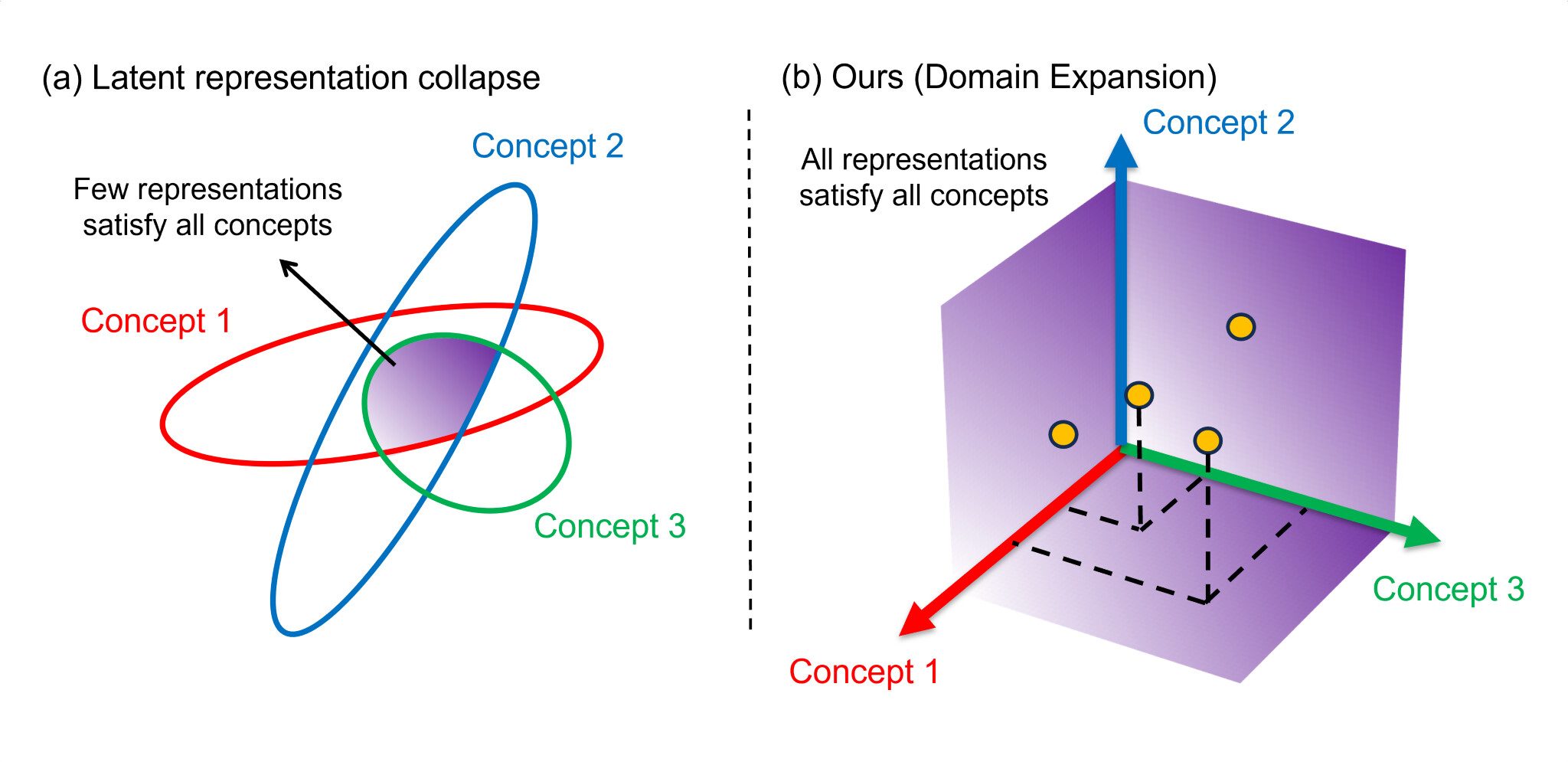
Chi-Yao Huang, Khoa Vo, Aayush Verma, Duo Lu, Yezhou Yang
Proceedings of the International Conference on Learning Representations (ICLR), 2026
project page / paper / video / code /
@InProceedings{Huang2026DE,
author = {Chi-Yao Huang and Khoa Vo and Aayush Verma and Duo Lu and Yezhou Yang},
title = {Domain Expansion: A Latent Space Construction Framework for Multi-Task Learning},
booktitle = {Proceedings of the International Conference on Learning Representations (ICLR)},
year = {2026},
}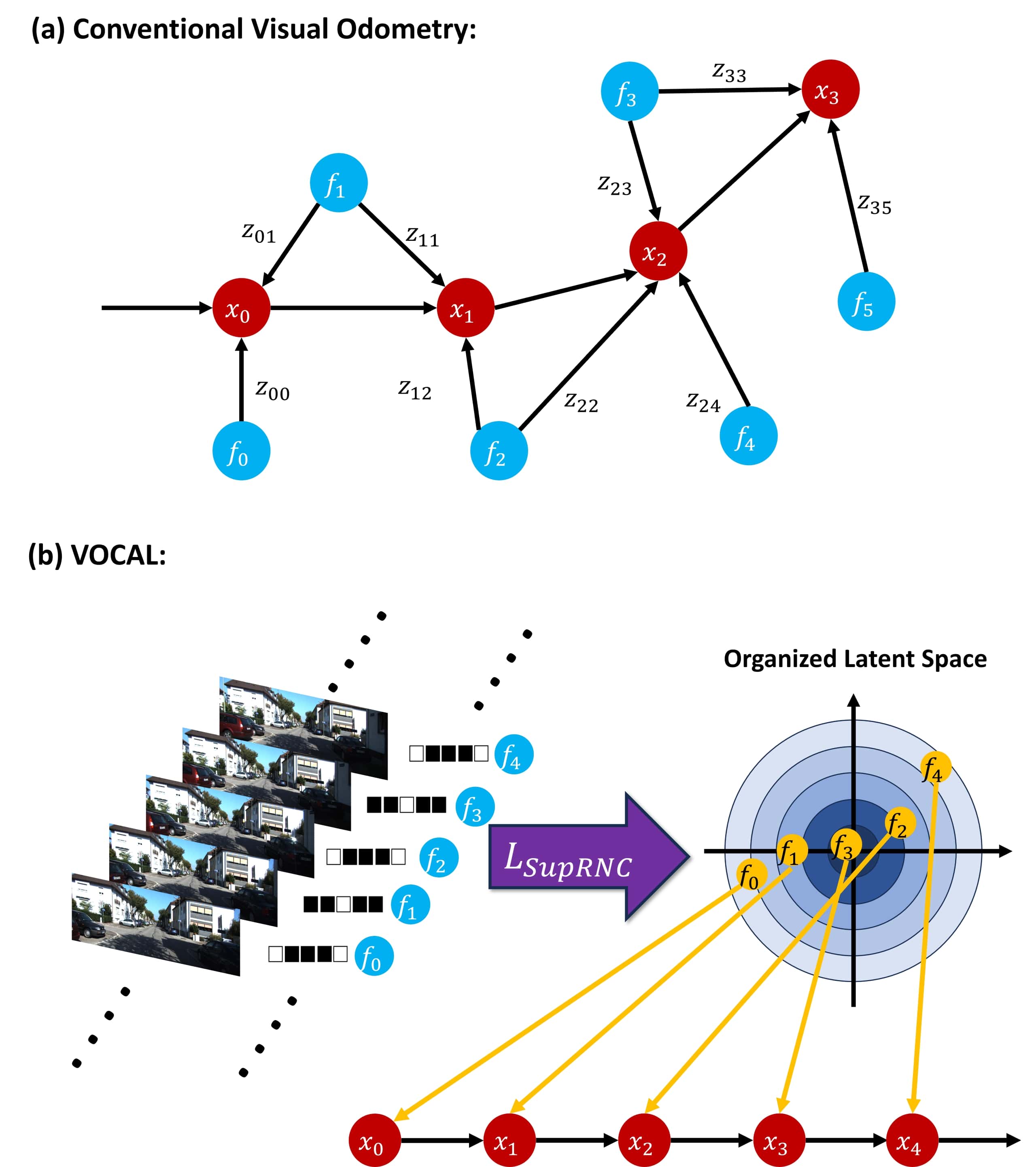
Chi-Yao Huang, Zeel Bhatt, Yezhou Yang
Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2026
project page / paper / video / demo /
@InProceedings{Huang2026VOCAL,
author = {Chi-Yao Huang and Zeel Bhatt and Yezhou Yang},
title = {VOCAL: Visual Odometry via ContrAstive Learning},
booktitle = {Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV)},
year = {2026},
}Projects
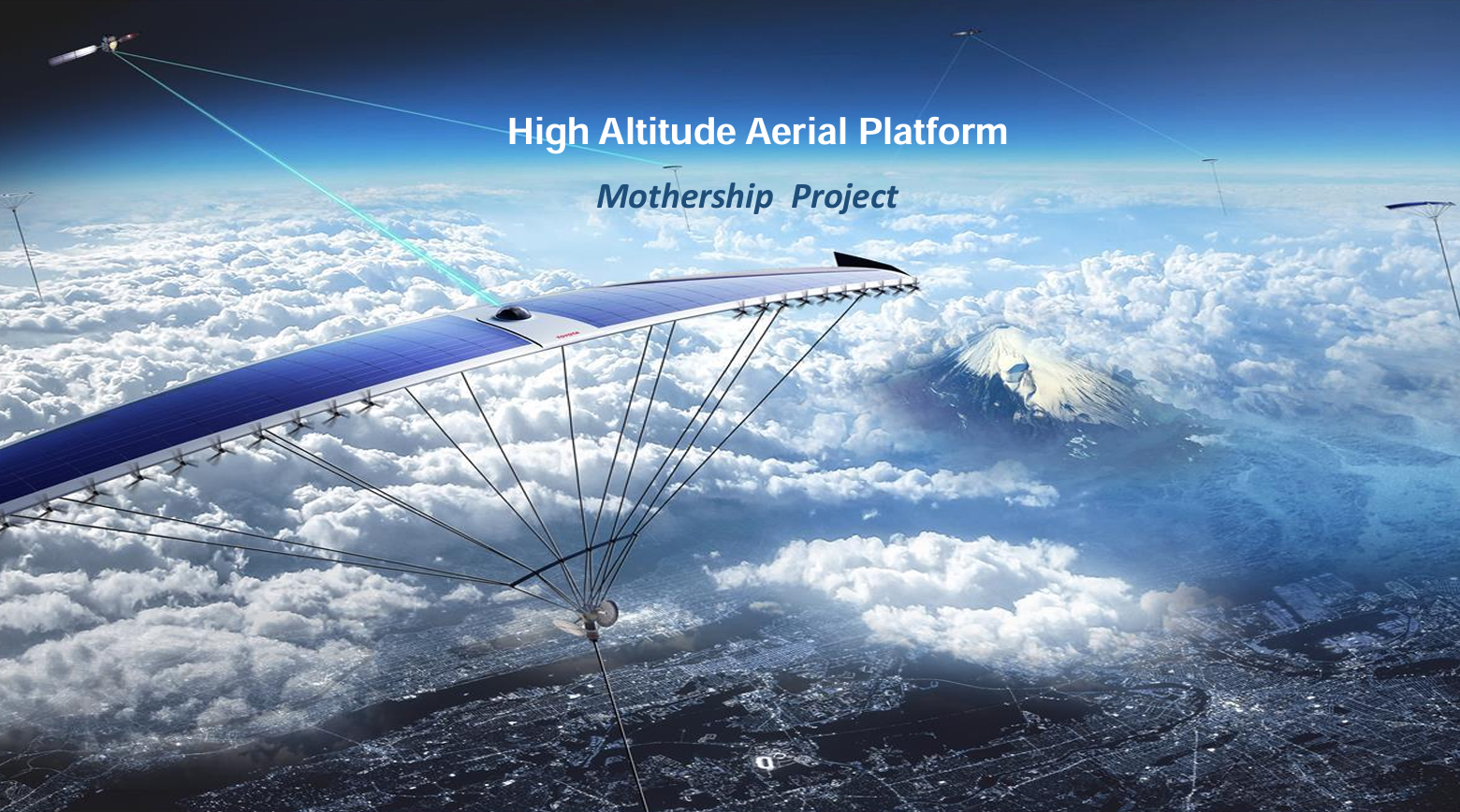
The Toyota Mothership project aims to develop a versatile, general-purpose aerial robot designed to assist with transportation, communication networks, and disaster prevention.
- Engineered a robust latent-centric pose estimation model for high-altitude aerial robots, leveraging IR and IMU sensor data to ensure reliability across diverse weather conditions.
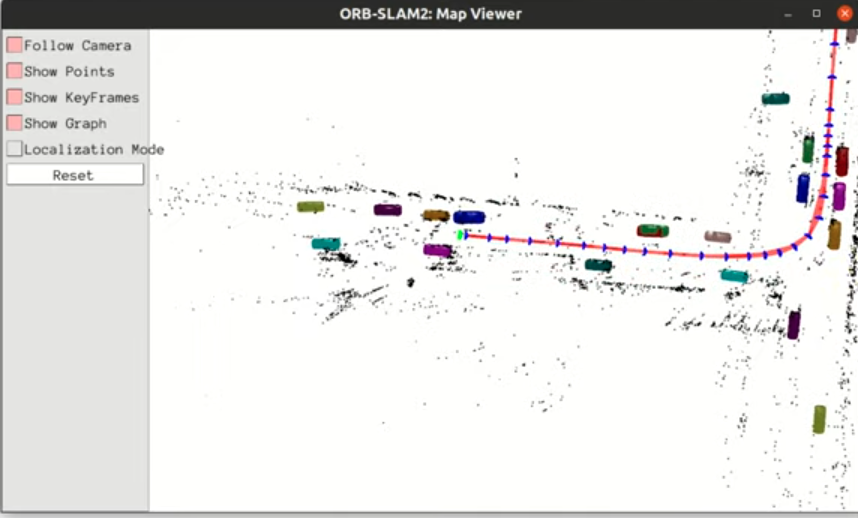
Simultaneous localization and mapping with zero-shot 3D object reconstruction.
- Zero-shot 3D shape reconstruction from a single image.
- Object recognition, tracking, and mapping.
- Designed a new object-based error function for bundle adjustment.
A* path planning for a biped robot.
- Zero-moment-point motion planning for a biped robot.
- A*-based obstacle avoidance.
Products

VIVE COSMOS is the prototype of all VR, AR, and XR products in VIVE.
- Developed the visual–inertial SLAM system for VR tracking.
- Designed multiple-camera motion estimation and sensor fusion algorithms.

Enterprise-grade mixed reality headset with high-resolution displays and ergonomic comfort.
- Developed the visual–inertial SLAM system for inside-out tracking.
- Designed multiple-camera motion estimation and sensor fusion algorithms.
- Collaborated with UX teams to optimize tracking for dynamic environments.

Lightweight, modular XR headset built for immersive mixed reality experiences.
- Implemented visual–inertial odometry algorithms optimized for low-latency XR.
- Designed and prototyped the core data structures and processing pipeline for a mixed-reality system.
- Engineered an obstacle avoidance system to enhance user safety in mixed-reality environments.

Compact, glasses-style VR headset designed for wellness, streaming, and portability.
- Designed the inside-out tracking algorithm for limited-FoV sensors.
- Developed a prototype motion tracking pipeline integrating a real-time hand-tracking system.
- Collaborated with optics and gaming teams to tune and optimize on-device performance.
Sponsors & Funding
Chi-Yao is supported by the ASU Ira A. Fulton Schools of Engineering Fellowship and Toyota Research Institute of North America (TRINA).

